
Swivel Hook
Automated
Manufacturing
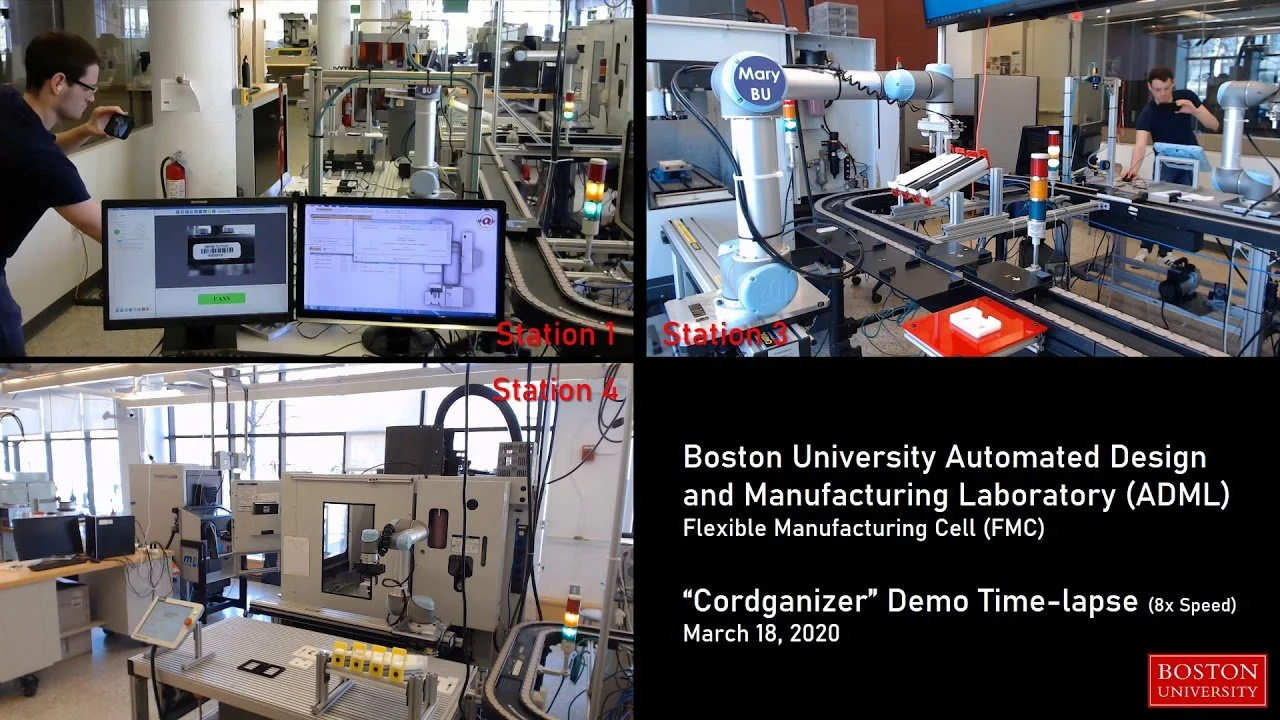
The ADML at Boston University is a flexible manufacturing cell consisting of 2 HAAS CNC Mills, 3 UR15 Robotic Arms, a conveyor belt, and various peripheral elements.
As a team of 5, we were tasked with using the ADML for an autonomous production line. Our team implemented the production of two separate products utilizing computer vision to determine the correct assembly.
All documentation and files for this project can be found here
Project Overview
Acting as the team lead, I got my hands dirty in everything from product design, project management, and presentation.
As an independent contributor, I was responsible for the computer vision segment of the process
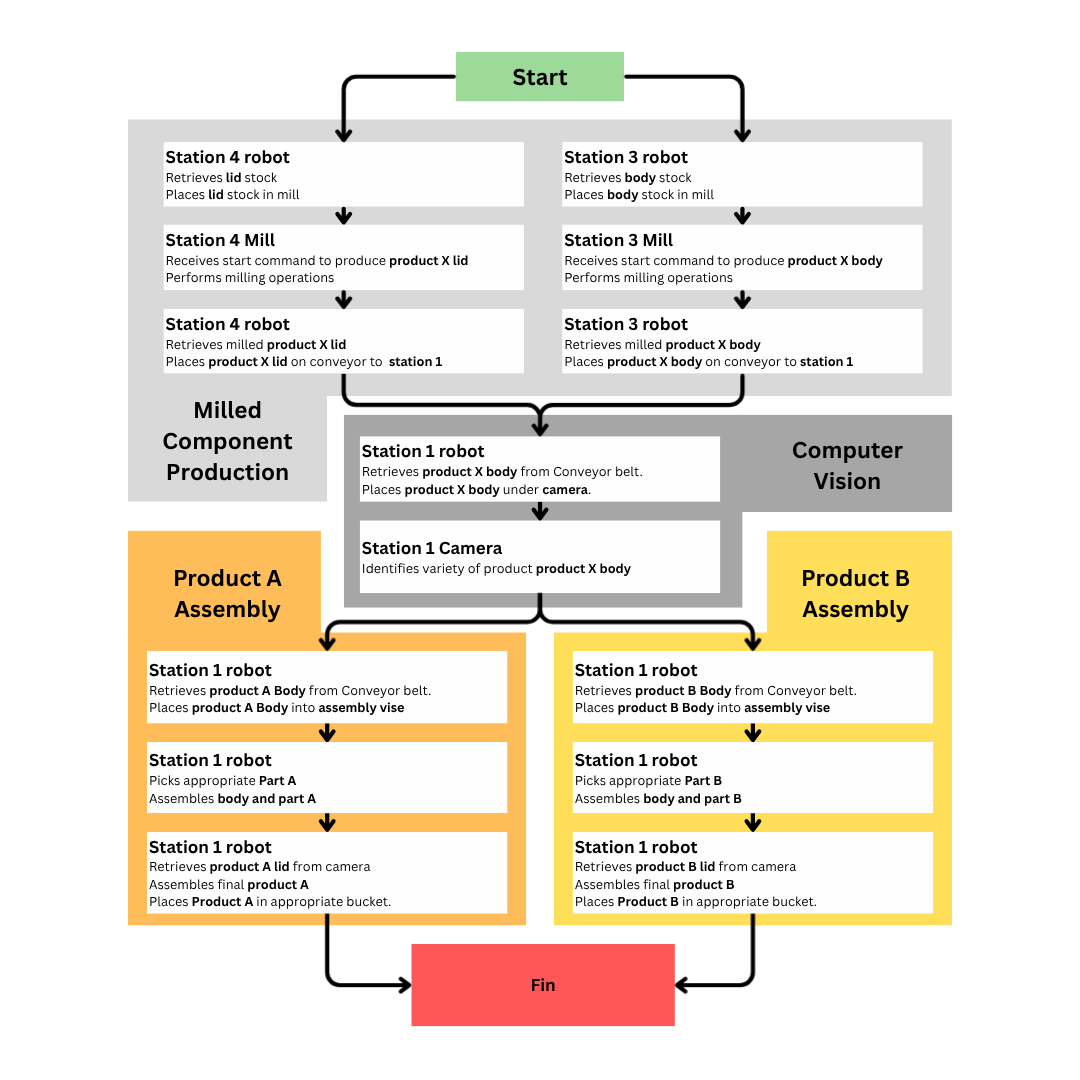
The flow chart on the right is my original proposal and the final process
Product Design
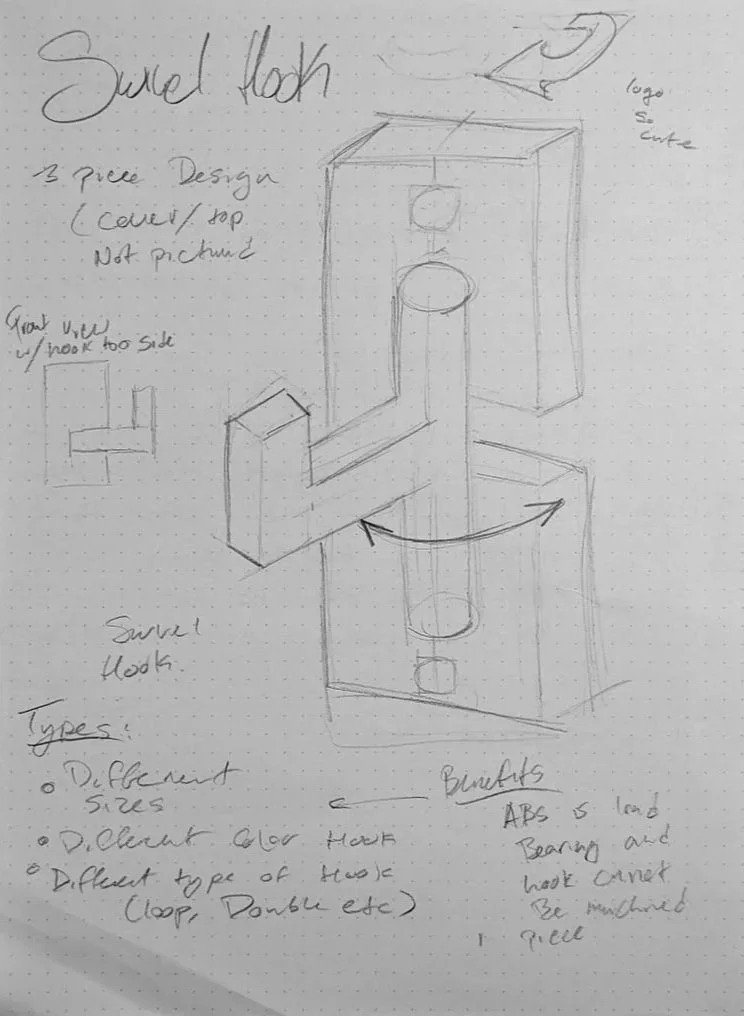
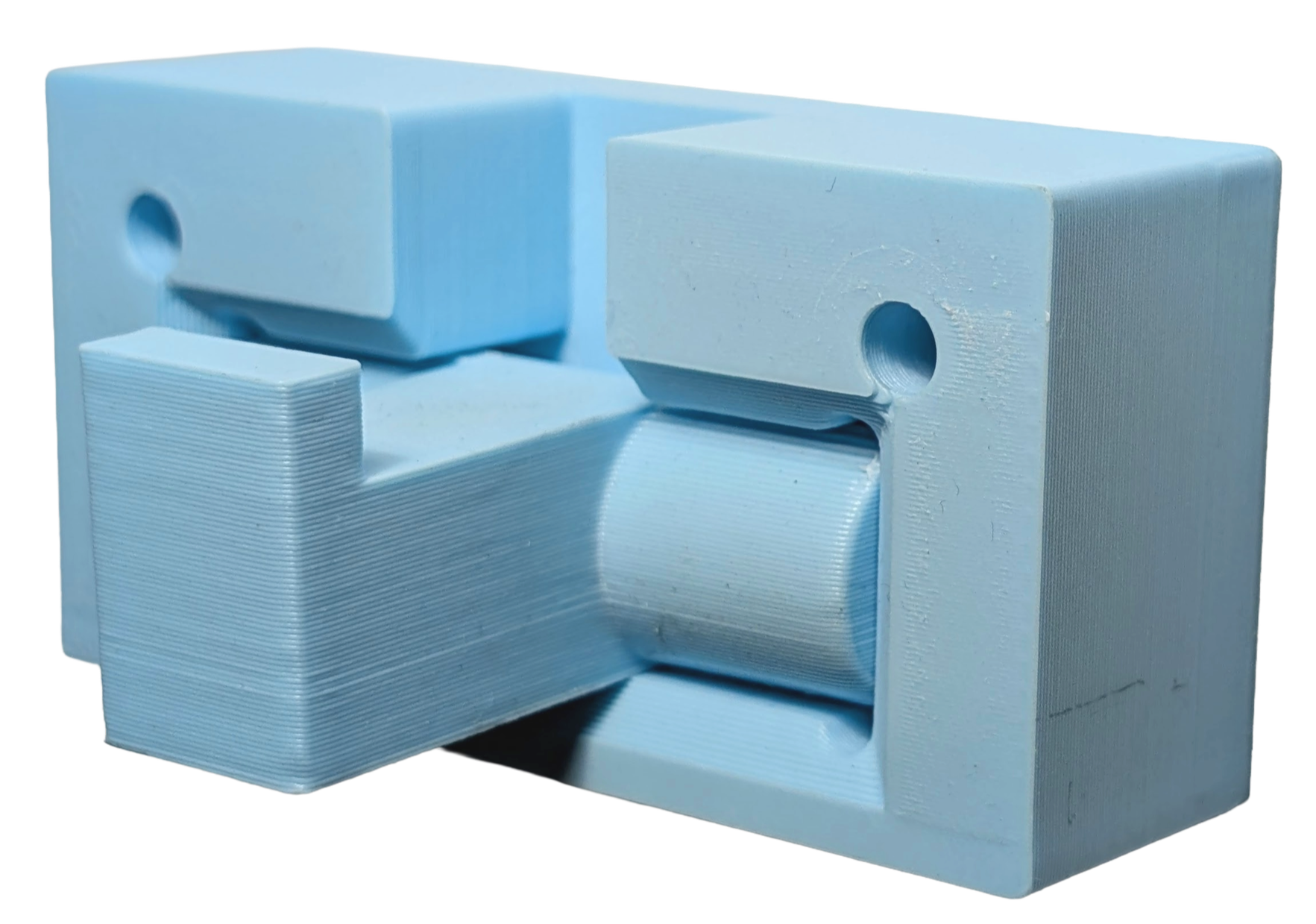
The product consists of 3 pieces: lid and base manufactured on the CNC mills and a premade 3d printed hook
Designed for both manufacturability and assembly, the dimensions are standardized across both variants. The body and lid were built around the available tooling for mills
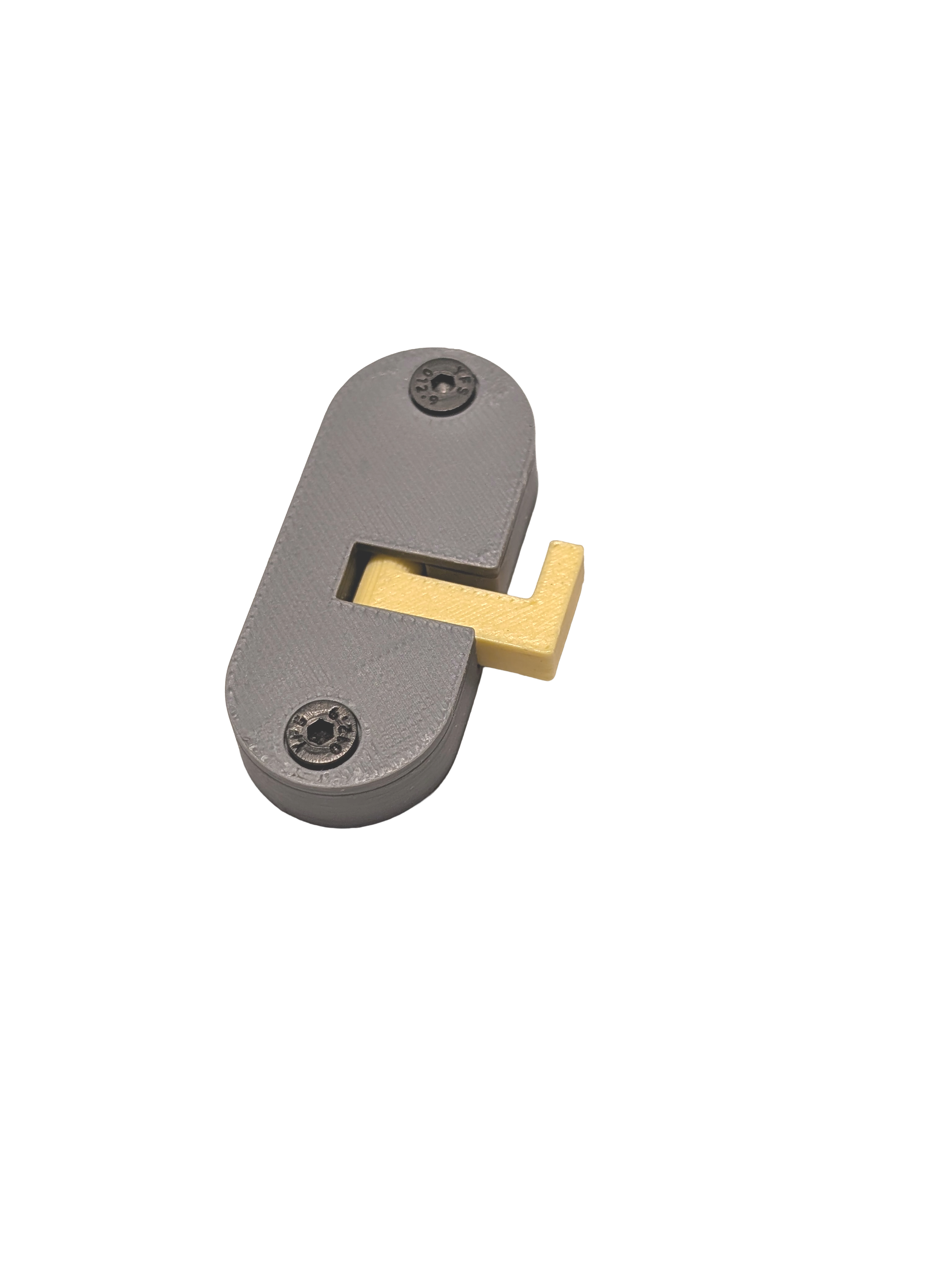
The finished products took a different approach, flushing out an interference fit as well as a detent for the hook


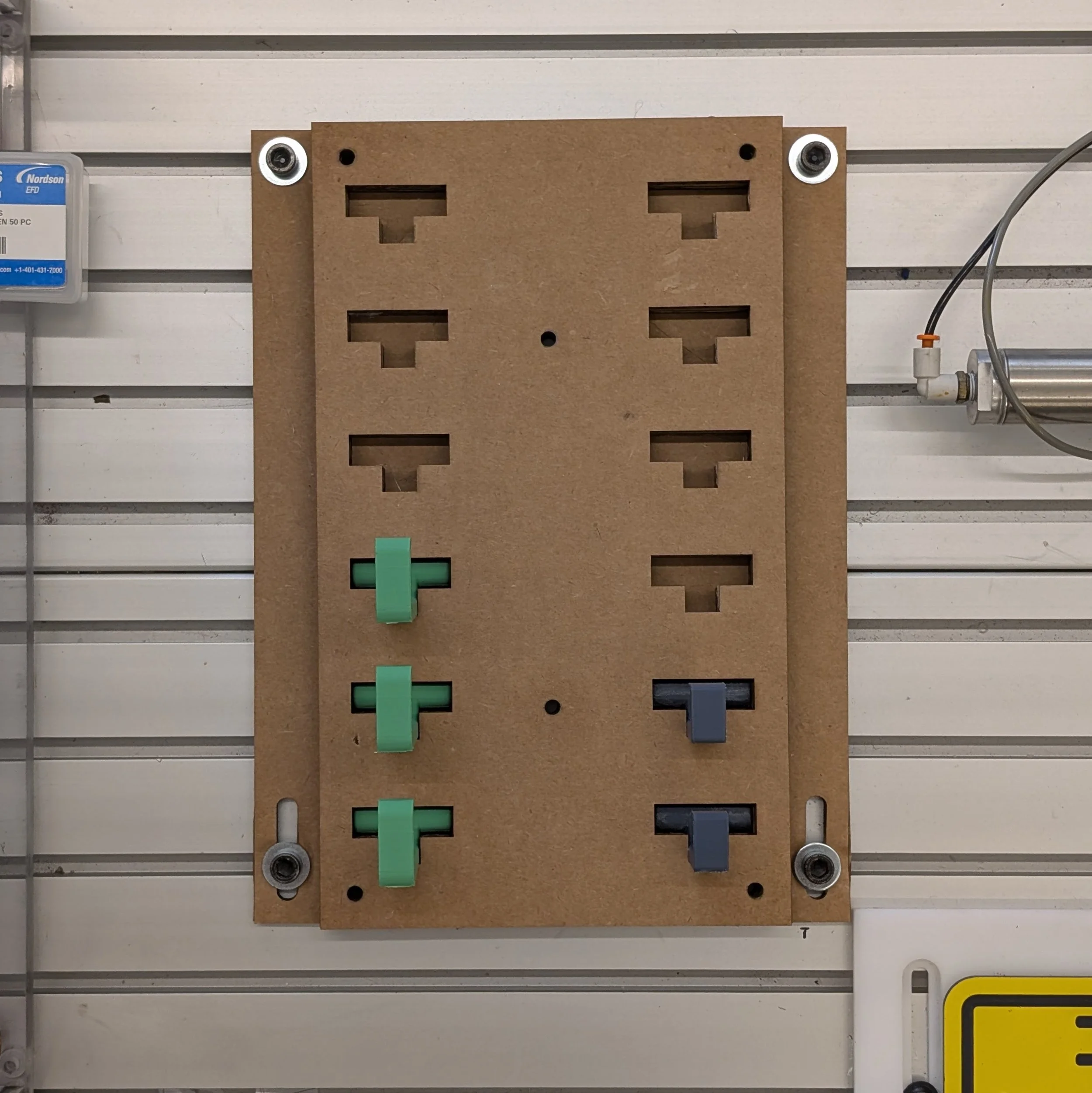
The laser cut inventory system. The system is able to keep track of hook placement, returning to the correct position
The final product in action
The final product in action
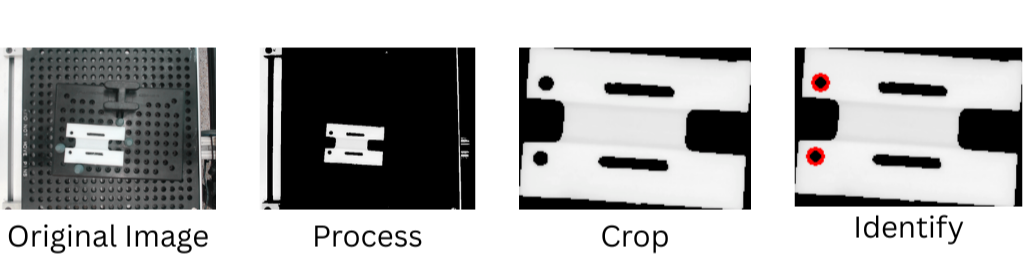
Computer Vision
All of the programming took place in python, with all code viewable in the GitHub repository.
The code contains utilities for future development and a bulk test runner. Testing was performed on over 2000 images under variable lighting with all images being correctly identified
Although simple, the threshold, determined by the hole spacing, sits 11 standard deviations away from both distributions.
Put simply, the system is 100% accurate
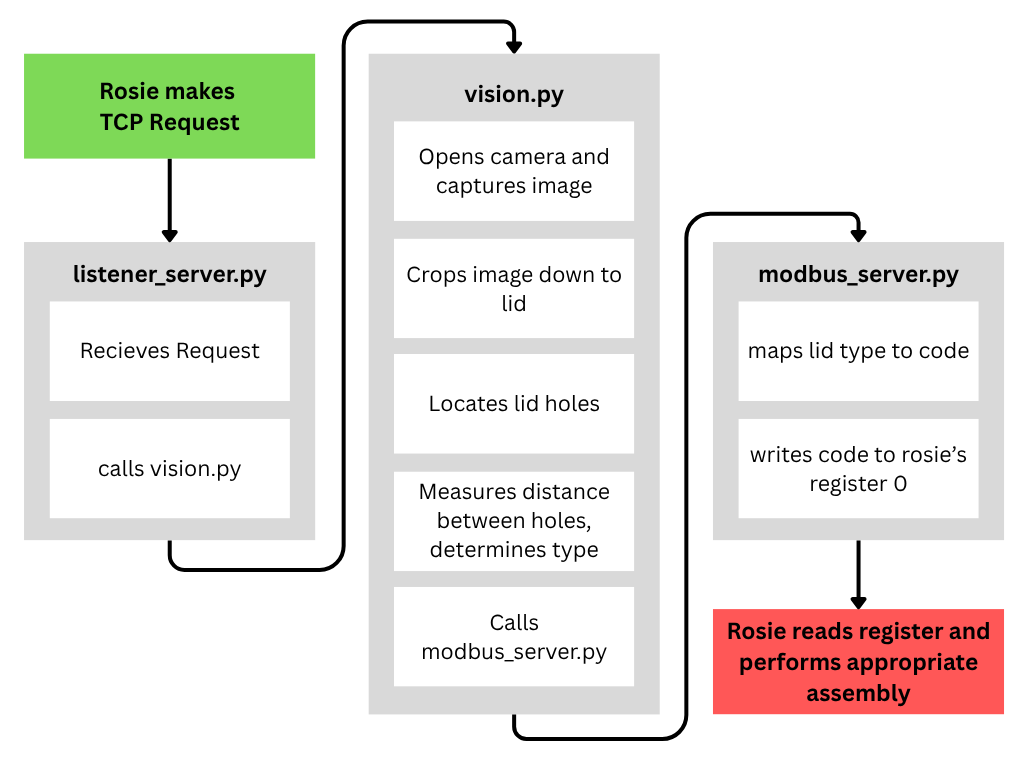
The vision system architecture consisted of a listener, processor and sender, decoupling functionality